成果(项目)简介 |
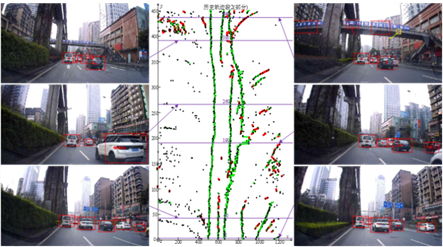
1. 在环境感知方面,由多个激光雷达结合相机对车辆周围环境信息进行感知,可对行人、车辆、车道线、标志牌及其他动静态障碍物进行检测跟踪。感知端在行远智能车队的发展除了应用激光雷达和毫米波雷达外,还采用了传统模式识别和深度学习(卷积神经网络等)两条技术路线同步发展。对深度神经网络结构专门进行了优化,使之能够在PC机上成功运行,能以较高实时性和准确率识别车辆周围动态与静态的行人、车辆、标志牌、障碍物;在此基础上,团队首次提出并应用了基于历史轨迹库的多目标跟踪算法。
 2. 在路径决策方面,结合GPS采集地图及在线定位等方法进行决策规划。决策规划算法主要针对不同场景进行适应场景需要的决策,如决策是否换道、是否避障并规划车辆下一步要行驶的路径。在行远号上采用基于预瞄的车辆路径跟踪控制,有效的对车辆进行加减速控制、转向控制、制动控制等。
 3. 在人机共驾方面,为了能够获得表征驾驶人在转向行为中特性演变规律,提出了一种基于驾驶员NMS模型的人机共驾动力学模型,该模型综合考虑了动态特性、牵张反射、参考机制、反馈刚度等因素。通过搭建驾驶模拟器和采集驾驶人工作肌群的肌表激活度信号,利用HLS对NMS中的重要特性参数进行离线辨识,设计UKF观测器观测非线性状态输出量。在该模型基础上,建立了考虑驾驶员NMS特征的人机共驾冲突仲裁和控制权分配策略,实车效果良好。

 |
本成果已获得的相关专利 (请另附专刊证书扫描件) |
资助项目 [1] 国家自然科学基金资助项目“《寒带地区Plug-in柴电混合动力汽车油耗和热端排放综合控制》(51305472)”; [2] 重庆市教委自然科学基金项目“基于PMP极小值原理的SAE3/4级智能汽车人机工驾控制权自适应分配机制研究(KJQN201800714)”; 授权专利 [1] 隗寒冰,曹旭,徐向阳,杜伟松,贾志杰.基于机器学习的ADAS系统的测评方法, ZL201610899609.6. [2] 隗寒冰,陈尧,任培林,杜伟松.基于虚拟道路载荷条件的制动器性能评价方法及系统, ZL201510787956.5; |



